Derniers Commentaires
NOS VISITEURS



La FishTe@m69 propose chaque année un peu plus de moyens afin de continuer à diffuser de l’information de manière ludique et éducative. Et cette année encore les investissements iront bon train, puisque après l’évolution des systèmes de prise de vue et accessoires assimilés (GoPro, IPhone, perches…), la Team continuera sa quête de technologie et plus précisément de cartographie des fonds, afin d’augmenter l’efficacité des pêches, et bien évidemment et comme à son habitude, partagé de manière saine et ouverte ses expériences !
2015 sera donc l’année de la bathymétrie et de la topologie pour la FishTeam69 ! Grâce à des sondeurs embarqués, nous avons, depuis 2014, entrepris un travail de bathymétrie méticuleux du plan d’eau du Grand Colombier d’Anse. Le Lac des Sapins, le Grand Large et les Eaux Bleues de Miribel sont également en cours. Le travail continu cette année et s’améliore, puisque nous disposerons, entre autre, de deux sondeurs supplémentaires et un pilote automatique I-Pilot Link. Alors quoi de mieux qu’une bonne explication des notions de bathymétrie et de mise en cartographie pour mieux s’y retrouver…
![]() Comme expliqué précédemment, la FishTeam69 investit constamment afin d’améliorer ces techniques et joue la carte du partage (sans jeu de mot) 😉
Comme expliqué précédemment, la FishTeam69 investit constamment afin d’améliorer ces techniques et joue la carte du partage (sans jeu de mot) 😉
Ce sont pas moins de deux nouveaux sondeurs multi-faisceaux qui rejoignent la Team, Humminbird et Lowrance, ainsi qu’un nouveau moteur électrique Minn-Kota I-Pilot Link, et un A-GPS Glonass…
Parmi les nouveautés High-Tech FishTeam69
HumminBird™ Multi Technologies 2015 – SI / DI / 360 / iLink…
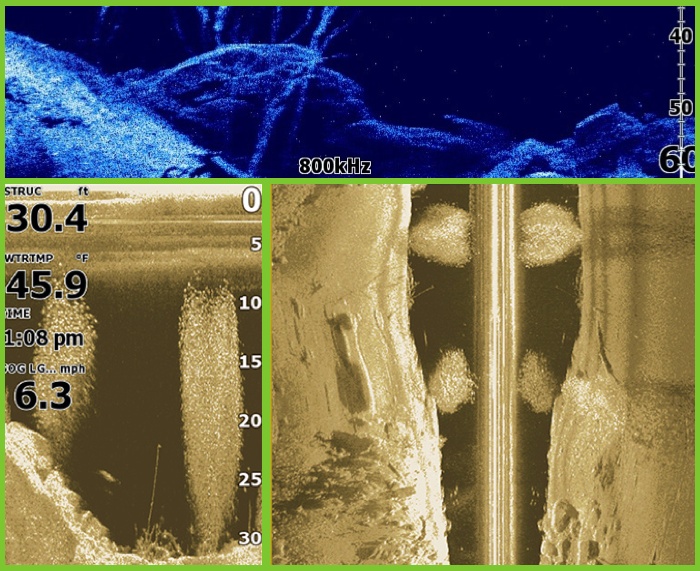
 Side Imaging : faisceaux très fins dirigés vers les côtés du bateau illuminant le relief du fond à la manière d’un négatif photo. Ils balayent jusqu’à une distance de 75 m de part et d’autre de la coque dans une profondeur max de 45 m en fournissant une image du fond extrêmement détaillée grâce à une analyse approfondie des couches fines.
Side Imaging : faisceaux très fins dirigés vers les côtés du bateau illuminant le relief du fond à la manière d’un négatif photo. Ils balayent jusqu’à une distance de 75 m de part et d’autre de la coque dans une profondeur max de 45 m en fournissant une image du fond extrêmement détaillée grâce à une analyse approfondie des couches fines.
 Down Imaging : Grâce à la nouvelle technologie Down Imaging, il est maintenant possible de voir avec netteté et précision tout ce qui est immergé à la verticale du bateau. Arbres, buissons, piles de pont, rochers et toute autre structure apparaîtront avec autant de détails que si vous nagiez dans l’eau.
Down Imaging : Grâce à la nouvelle technologie Down Imaging, il est maintenant possible de voir avec netteté et précision tout ce qui est immergé à la verticale du bateau. Arbres, buissons, piles de pont, rochers et toute autre structure apparaîtront avec autant de détails que si vous nagiez dans l’eau.
 360° Imaging : cela permet d’avoir une vue précise du relief du fond sur 360° et jusqu’à 100 m autour du bateau. Une technologie incroyable qui vous permet de voir les obstacles et autres structures bien avant de les voir lorsque le bateau se trouvent à la verticale des obstacles.
360° Imaging : cela permet d’avoir une vue précise du relief du fond sur 360° et jusqu’à 100 m autour du bateau. Une technologie incroyable qui vous permet de voir les obstacles et autres structures bien avant de les voir lorsque le bateau se trouvent à la verticale des obstacles.
 GPS Ultra Précis, Captures d’écran ou vidéo, Compatibles AiS, NMEA 2000, iPilot Link, Compatibles cartographies Navionics Gold et Platinum Plus, Vue 3D de la carte, stockage SD-Card, connectique Ethernet…
GPS Ultra Précis, Captures d’écran ou vidéo, Compatibles AiS, NMEA 2000, iPilot Link, Compatibles cartographies Navionics Gold et Platinum Plus, Vue 3D de la carte, stockage SD-Card, connectique Ethernet…
 Moteur Minn-Kota Terrova™ I-Pilot Link 2015
Moteur Minn-Kota Terrova™ I-Pilot Link 2015
 Moteur 55 lbs, Auto-pilote sur mod AP ou AP/US2, I Pilot Link, I Pilot V2, Jauge de batterie, Stow Deploy, Universal Sonar sur mod AP/US2.
Moteur 55 lbs, Auto-pilote sur mod AP ou AP/US2, I Pilot Link, I Pilot V2, Jauge de batterie, Stow Deploy, Universal Sonar sur mod AP/US2.
I Pilot Link : Ce système est le chainon manquant qui communique entre le moteur electrique Minn Kota et un sondeur Humminbird. Le système I-Pilot link permet de faire communiquer un moteur électrique Minnkota et un combiné Humminbird par l’intermédiaire du réseau Ethernet. Pour l’heure pas mal de fonctionnalités, comme suivre des courbes de niveau ou une distance par rapport au bord, etc…
Lowrance™ 2015 – DownScan Imaging™ et Sonde avancée CHIRP™
L’innovation exclusive DownScan Imaging™ Lowrance affiche des images de qualité photo très claires du monde sous-marin sous le bateau.
 CHIRP : Cette nouvelle série Elite, technologie CHIRP, dite à balayage de fréquence, peut clairement différencier le poisson fourrage des gros échos, quelle que soit la profondeur. Cette gamme permet ainsi aux pêcheurs d’obtenir les meilleures vues possibles de la colonne d’eau, et améliore encore un peu plus la détection des cibles et la réjection du bruit de fond.
CHIRP : Cette nouvelle série Elite, technologie CHIRP, dite à balayage de fréquence, peut clairement différencier le poisson fourrage des gros échos, quelle que soit la profondeur. Cette gamme permet ainsi aux pêcheurs d’obtenir les meilleures vues possibles de la colonne d’eau, et améliore encore un peu plus la détection des cibles et la réjection du bruit de fond.
 Iphone 6™ Integrated GPS 2015
Iphone 6™ Integrated GPS 2015
![]() IPhone GPS / A-GPS ou Assited GPS : il utilise les récepteurs GPS d’un opérateur pour aider un terminal mobile à connaître quels signaux GPS il doit suivre. Grâce à cette assistance, la recherche de signal effectuée par le terminal est grandement réduite. La durée nécessaire pour la première connexion ou TTFF (Time To First Fix) passe de plusieurs minutes à seulement quelques secondes. De plus, contrairement aux récepteurs GPS traditionnels, le récepteur A-GPS intégré dans le terminal est en mesure de détecter et démoduler des signaux de très faible magnitude. Précision +/- 3m.
IPhone GPS / A-GPS ou Assited GPS : il utilise les récepteurs GPS d’un opérateur pour aider un terminal mobile à connaître quels signaux GPS il doit suivre. Grâce à cette assistance, la recherche de signal effectuée par le terminal est grandement réduite. La durée nécessaire pour la première connexion ou TTFF (Time To First Fix) passe de plusieurs minutes à seulement quelques secondes. De plus, contrairement aux récepteurs GPS traditionnels, le récepteur A-GPS intégré dans le terminal est en mesure de détecter et démoduler des signaux de très faible magnitude. Précision +/- 3m.
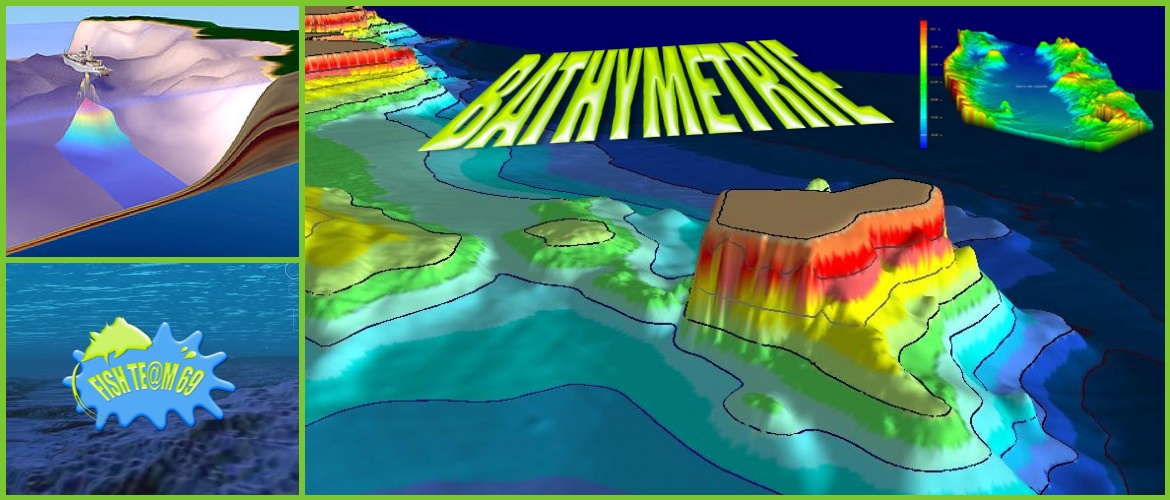
 L’utilisation des données enregistrées par les sondeurs, couplé au positionnement GPS et fusionné avec des données existantes (IGN, SHOM, BDT, LIDAR, LITTO3D…), nous permet d’établir des cartes de fusion bathymétrique et topologique comme ci-après.
L’utilisation des données enregistrées par les sondeurs, couplé au positionnement GPS et fusionné avec des données existantes (IGN, SHOM, BDT, LIDAR, LITTO3D…), nous permet d’établir des cartes de fusion bathymétrique et topologique comme ci-après. Les levés terrestres et fluviaux bathymétriques sont fondamentaux pour la modélisation hydraulique car les données bathymétriques diffusables ne peuvent pas être obtenues actuellement par une autre technique. On notera qu’il est toutefois possible de se contenter d’une bathymétrie approximative si par ailleurs on dispose de lignes d’eau observées de qualité et pour différents débits. Le travail de réglage permet alors d’ajuster les sections du lit mineur.
Les levés terrestres et fluviaux bathymétriques sont fondamentaux pour la modélisation hydraulique car les données bathymétriques diffusables ne peuvent pas être obtenues actuellement par une autre technique. On notera qu’il est toutefois possible de se contenter d’une bathymétrie approximative si par ailleurs on dispose de lignes d’eau observées de qualité et pour différents débits. Le travail de réglage permet alors d’ajuster les sections du lit mineur.
![]() Nous intégrerons les cartes créées aux Spots FishTeam69 et dans les cartes dynamiques Google Maps pour une meilleures visualisations depuis les articles. Une gestion des POI (Points d’Intérêts) avec images DSI et 360° Imaging est prévue également.
Nous intégrerons les cartes créées aux Spots FishTeam69 et dans les cartes dynamiques Google Maps pour une meilleures visualisations depuis les articles. Une gestion des POI (Points d’Intérêts) avec images DSI et 360° Imaging est prévue également.
 Depuis l’année 2014, nous avons commencé un travail de bathymétrie méticuleux du plan d’eau du Grand Colombier d’Anse, du Lac des Sapins, du Grand Large et des Eaux Bleues de Miribel. D’autres suivront… Les données des différents sondeurs seront fusionnées et des modélisations bathymétriques pourront être établies et partagées ! Une plateforme Web adapté à l’IPhone et à son GPS est en cours de développement. Lisez ceci.
Depuis l’année 2014, nous avons commencé un travail de bathymétrie méticuleux du plan d’eau du Grand Colombier d’Anse, du Lac des Sapins, du Grand Large et des Eaux Bleues de Miribel. D’autres suivront… Les données des différents sondeurs seront fusionnées et des modélisations bathymétriques pourront être établies et partagées ! Une plateforme Web adapté à l’IPhone et à son GPS est en cours de développement. Lisez ceci.
La bathymétrie est la science de la mesure des profondeurs et du relief de l’océan ou des rivières pour déterminer la topographie du fond.
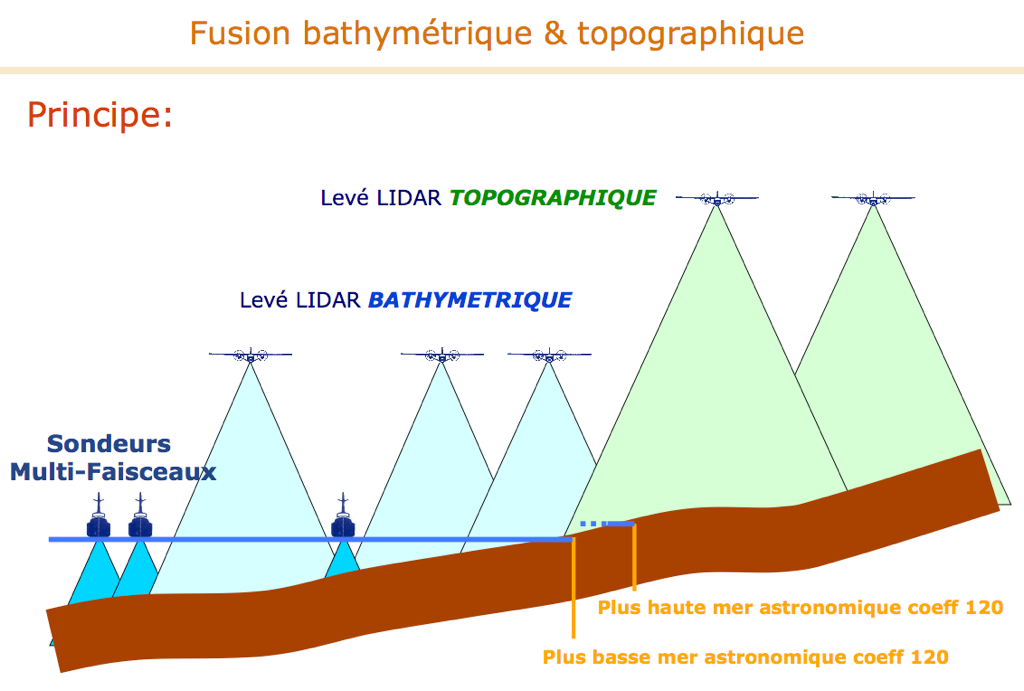
 Un sondeur est un système acoustique sous-marin composé de transducteurs (émetteurs) et d’antennes qui transforment l’énergie électrique en énergie acoustique et vice versa. L’onde acoustique se propage à travers une tranche d’eau, se réfléchit sur un obstacle (en général, le fond) et revient dans la direction inverse vers l’antenne. Un écho-sondeur acoustique détermine la profondeur en émettant une impulsion sonore au travers d’un faisceau directionnel. La mesure du temps nécessaire au signal pour parcourir le trajet navire/fond/navire permet d’accéder à la mesure de la profondeur. L’une des caractéristiques principales d’un échosondeur est sa fréquence d’émission (qui correspond au nombre de vibrations élémentaires émises par seconde). Elle détermine la longueur d’onde du signal, sa portée (l’amortissement du son dans l’eau augmente avec la fréquence). Ainsi, selon les instruments, la fréquence peut varier de 10 kHz pour les grands fonds à 400 kHz pour les très petits fonds.
Un sondeur est un système acoustique sous-marin composé de transducteurs (émetteurs) et d’antennes qui transforment l’énergie électrique en énergie acoustique et vice versa. L’onde acoustique se propage à travers une tranche d’eau, se réfléchit sur un obstacle (en général, le fond) et revient dans la direction inverse vers l’antenne. Un écho-sondeur acoustique détermine la profondeur en émettant une impulsion sonore au travers d’un faisceau directionnel. La mesure du temps nécessaire au signal pour parcourir le trajet navire/fond/navire permet d’accéder à la mesure de la profondeur. L’une des caractéristiques principales d’un échosondeur est sa fréquence d’émission (qui correspond au nombre de vibrations élémentaires émises par seconde). Elle détermine la longueur d’onde du signal, sa portée (l’amortissement du son dans l’eau augmente avec la fréquence). Ainsi, selon les instruments, la fréquence peut varier de 10 kHz pour les grands fonds à 400 kHz pour les très petits fonds.
L’inconvénient majeur des systèmes mono-faisceaux est que la zone acquise sur le fond est formée d’une tache d’insonification uniforme à l’aplomb du navire (correspondant à une ouverture angulaire de l’ordre de 9 à 12°). La résolution spatiale est donc dégradée par cette large ouverture angulaire. De plus, à moins de multiplier les lignes de lever, les MNT réalisés à partir de ce type de données ne peuvent l’être qu’au prix d’une forte interpolation.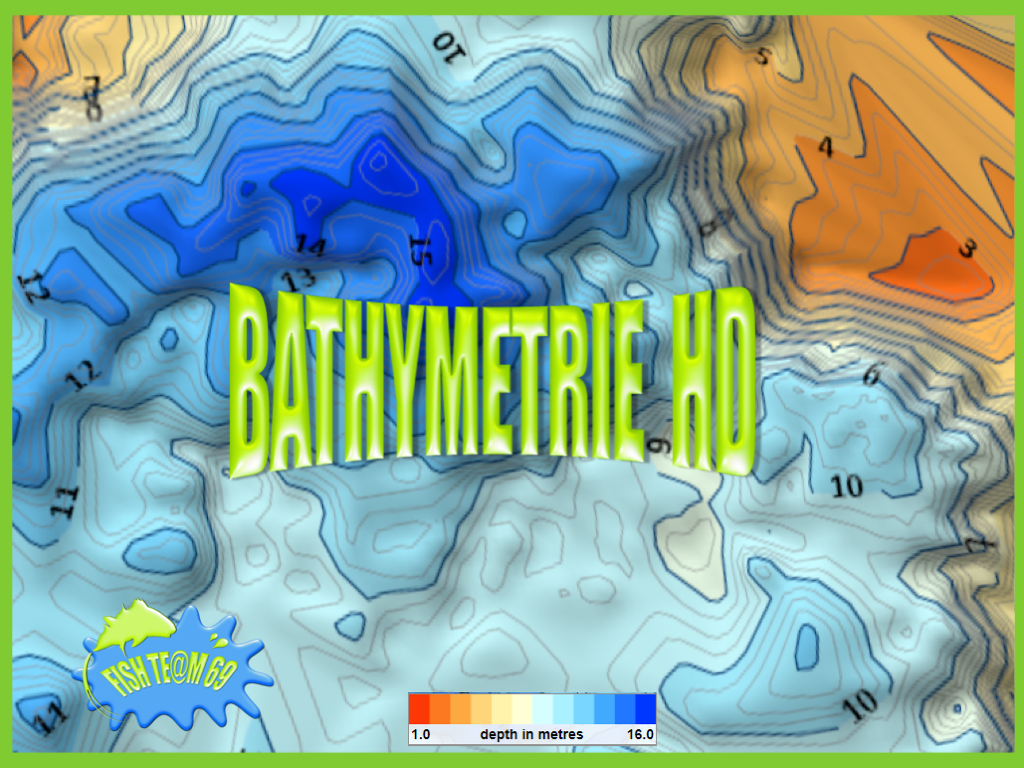 High-Resolution HD contour lines by FT69 !
High-Resolution HD contour lines by FT69 !
Pour pallier ces problèmes de dégradation de la résolution spatiale, le sondeur multi- faisceau (SMF) mesure simultanément des sondes selon plusieurs directions, sur toute une fauchée perpendiculaire à l’axe du bateau. Généralement, la réception de l’écho réfléchi sur le fond se fait dans l’axe du navire, perpendiculairement à l’émission, en « faisceaux croisés ». L’intersection de ces faisceaux sur le fond représente la tâche d’insonification. Par rapport à un levé au mono-faisceau, la zone acquise sur le fond est donc beaucoup plus large et composée d’une « mosaïque » de taches d’insonification mieux résolues (correspondant à une ouverture angulaire de l’ordre de 1,5°). La densité des données acquises est variable. Longitudinalement à l’axe du navire, elle dépend de la cadence d’acquisition et de la vitesse du bateau.
Transversalement, elle dépend de la profondeur et de l’angle d’ouverture du sondeur. En effet, la résolution spatiale est d’autant meilleure que :
En revanche, plus la profondeur est faible, plus la fauchée en émission est étroite. Il faut alors donc plus de passages du bateau. En résumé :
 Outre les produits de modèles numériques de terrain bathymétriques régionaux en diffusion, il est possible de réaliser et distribuer des modèles numériques de terrain à haute résolution de référence, pour des besoins spécifiques. Alors que le modèle physique s’appuie sur le respect de lois de similitudes, le modèle mathématique s’appuie sur des équations qui décrivent le comportement de l’écoulement entre autre. Dans un cas comme dans l’autre des simplifications sont inévitables…
Outre les produits de modèles numériques de terrain bathymétriques régionaux en diffusion, il est possible de réaliser et distribuer des modèles numériques de terrain à haute résolution de référence, pour des besoins spécifiques. Alors que le modèle physique s’appuie sur le respect de lois de similitudes, le modèle mathématique s’appuie sur des équations qui décrivent le comportement de l’écoulement entre autre. Dans un cas comme dans l’autre des simplifications sont inévitables…
Les outils de simulation numérique et physique sont en fait complémentaires et peuvent être utilisés dans une même étude. Alors que le modèle physique est le seul qui permette une modélisation fine d’écoulements complexes locaux (notamment les écoulements 3D), le modèle mathématique permet de simuler les écoulement sur des grandes longueurs de biefs. L’art de l’ingénieur est ici nécessaire pour choisir le bon modèle et mettre en œuvre une schématisation adéquate.
Pour produire des modèles numériques de terrain bathymétriques, il faut utiliser :
Les levés présents dans les bases de données bathymétriques nationale, constituent la connaissance nationale accumulée depuis le XIXème siècle et issus pour les plus anciens de la digitalisation des documents analogiques. Ces bases de données se composent ainsi de données hétérogènes (acquises au plomb de sonde, aux sondeurs monofaisceau ou multifaisceaux, ou au LIDAR bathymétrique, etc…). La densité de ces données conditionne le choix d’une maille adaptée, généralement entre quelques centimètres et 50 m en domaine côtier. Le choix d’une méthode d’interpolation peut aussi être adapté aux données. (Litto3D® en France métropolitaine et outre-mer) sont disponibles. Divers formats sont possibles, dont parmi les plus courants, NetCDF GMT, ArcGIS (binaire ou ASCII), BAG/S-102.Sur les côtes de France métropolitaine, le référencement vertical souhaité (soit zéro hydrographique, soit niveau des plus basses mers astronomiques ou niveau moyen) du produit est obtenu au moyen des surfaces de référence Bathyelli. En l’absence du produit Bathyelli, les changements de référence sont opérés par interpolation de connaissances ponctuelles des références verticales.
La connaissance de la bathymétrie constitue un besoin pour de nombreuses applications :
Dans ces domaines, qu’elle soit intégrée dans des travaux de recherche ou des services opérationnels émanant des sphères privées ou institutionnelles, l’amélioration de la connaissance de la bathymétrie est un axe de progrès notable. Ainsi, l’augmentation des capacités des calculateurs utilisés pour la modélisation hydrodynamique par exemple, s’accompagne d’une amélioration de la résolution et de la précision des MNT en entrée.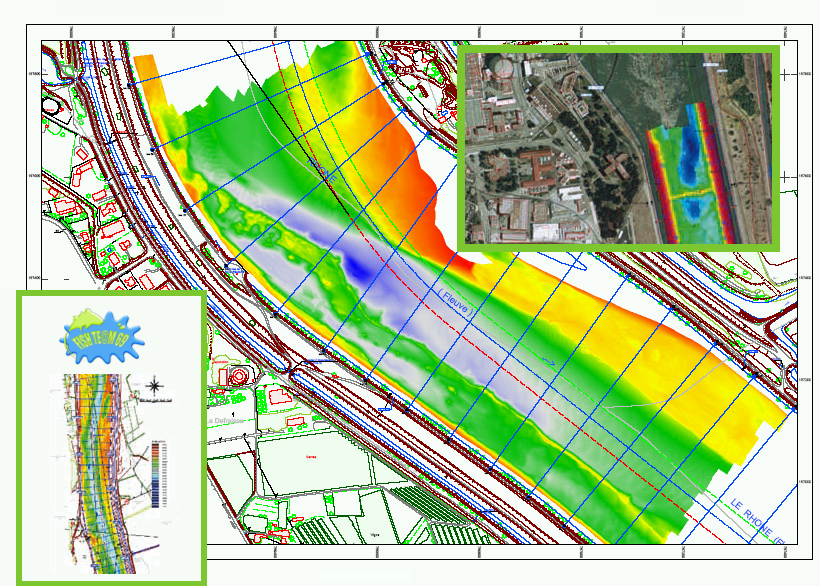 Cartes disponibles à l’achat :
Cartes disponibles à l’achat :
![]() Les bases de données cartographiques BD CARTO et BD CARTHAGE dont on dispose actuellement en France (BD ALTI, BD MONA, BD TOPO) sont disponibles à l’achat. Les sources des informations proviennent pour partie des diffuseurs de données: Institut Géographique National (IGN) pour BD CARTO, BD ALTI et BD TOPO, GEOSYS DATA (GEOSYS) pour BD MONA, pour partie des dossiers du Centre d’Etudes sur les Réseaux, les Transports, l’Urbanisme et les constructions publiques (CERTU).
Les bases de données cartographiques BD CARTO et BD CARTHAGE dont on dispose actuellement en France (BD ALTI, BD MONA, BD TOPO) sont disponibles à l’achat. Les sources des informations proviennent pour partie des diffuseurs de données: Institut Géographique National (IGN) pour BD CARTO, BD ALTI et BD TOPO, GEOSYS DATA (GEOSYS) pour BD MONA, pour partie des dossiers du Centre d’Etudes sur les Réseaux, les Transports, l’Urbanisme et les constructions publiques (CERTU).
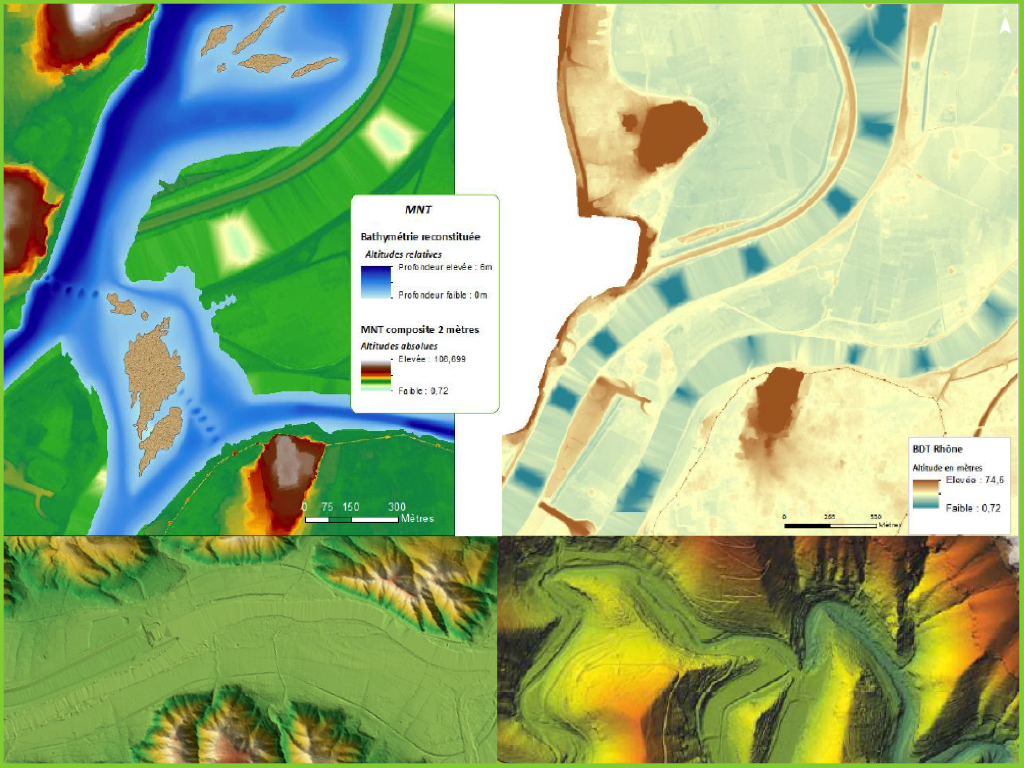 Ci-dessus, des exemples de la fusion de données bathymétrique et topologique pour définir un MNT (Modèle Numérique de Terrain) pour différentes parties du Rhône.
Ci-dessus, des exemples de la fusion de données bathymétrique et topologique pour définir un MNT (Modèle Numérique de Terrain) pour différentes parties du Rhône.
Les conditions d’utilisation des données issues de bases de données commercialisées sont réglementées. Les licences sont concédées à un service utilisateur qui peut lui-même les mettre à disposition d’un prestataire de services de façon temporaire moyennant la signature d’un acte d’engagement (basé sur un modèle standard) explicitant l’usage possible des données.
![]() GARMIN propose sa version BlueChart g2 Vision qui reprend l’ensemble des caractéristiques des cartes BlueChart g2 et vous proposent des fonctions avancées telles que :
GARMIN propose sa version BlueChart g2 Vision qui reprend l’ensemble des caractéristiques des cartes BlueChart g2 et vous proposent des fonctions avancées telles que :




![]() NAVIONICS propose également des cartes via l’application Navionics Boating et «Marine» et«Marine & Lakes» pour iPhone, iPad et Android (depuis le 18 Juin 2014) propose de nombreuses fonctionnalités !
NAVIONICS propose également des cartes via l’application Navionics Boating et «Marine» et«Marine & Lakes» pour iPhone, iPad et Android (depuis le 18 Juin 2014) propose de nombreuses fonctionnalités !

Cependant, aucunes cartes Navionics (HomePort) ou Garmin (Boating HD) ne comportent de données bathymétriques sur la partie amont du Rhône à partir d’Avignon. La zone Lyonnaise est absente, y compris des données Community (données partagées par les utilisateurs). Concernant les plans d’eau, c’est le désert également, et seuls quelques grands lacs Rhône-Alpins sont représentés !
La précision de ce type d’extrapolation et de représentation, vous l’aurez compris, est à prendre avec précaution suivant les moyens mises en œuvre, et de la précision et la nature des données collectées (encore faut-il posséder ces détails), et le coût associé de ces supports !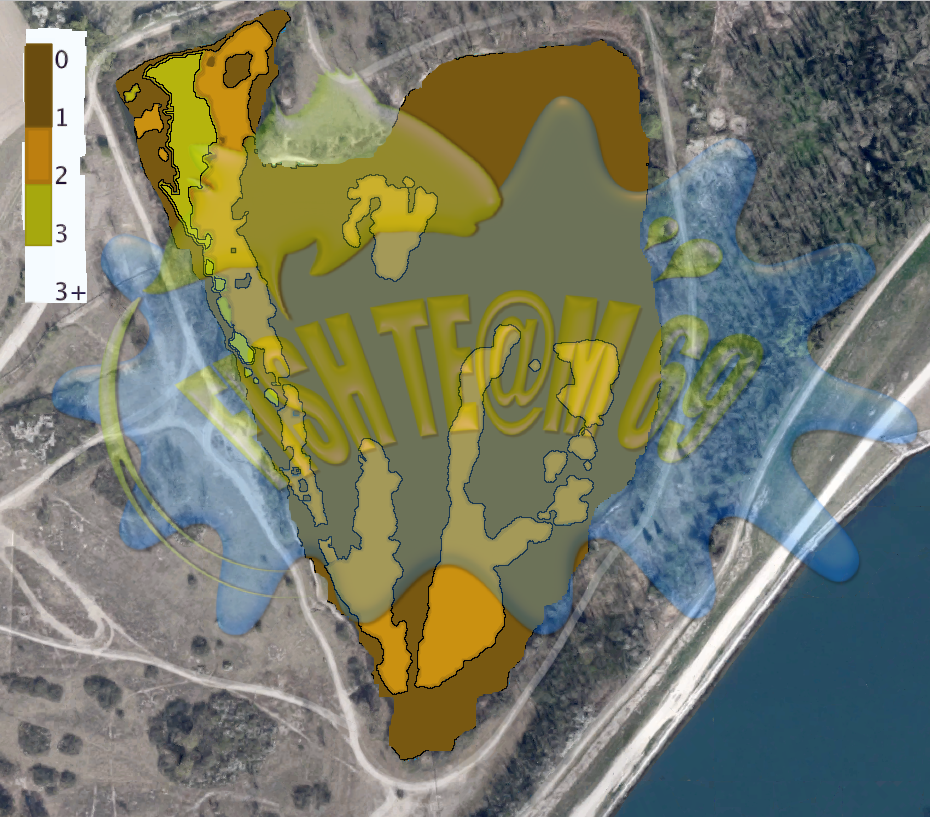
MNT du Lac d’Emprunt de Miribel by FishTeam69…
Malgré tout, sur le site de la FishTeam69, c’est gratuit et c’est bien pratique pour affiner ces techniques de prospection 😉
![]() FishTe@m69, pour le développement du loisir de pêche !
FishTe@m69, pour le développement du loisir de pêche !
Ces informations ont également étés enrichies grâce au site Wiki-Hydro, et des travaux de recherche Laboratoire MATIS – IGN – Clément Mallet. Pour comprendre un peu plus, lisez cette excellente doc : Plaquette BDT Rhone et celle de Rivicad.
![]() MISES A JOURS HORS RÉCITS
MISES A JOURS HORS RÉCITS
→ 12/2018 | Réglementation 2019
→ 10/2018 | New Record Perche
→ 05/2017 | iNav@FT69 Version 2.5
→ 06/06/2015 | Plateforme Web iShare@FT69
![]() DEJA DANS LE RECIT 2025
DEJA DANS LE RECIT 2025
→ Changement de politique cette année !
![]() MISES A JOURS CARTES iNAV@FT69
MISES A JOURS CARTES iNAV@FT69












 ABSOLU PECHE
– Pêcheurs avertis ou débutants, où allez vous pêcher ce week-end?
ABSOLU PECHE
– Pêcheurs avertis ou débutants, où allez vous pêcher ce week-end?Accueil | Mentions Légales | CGU_iShare_iNav | Politique_Confidentialite | Remerciements | RSS : s'abonner | Thanks to Cr@zypush
Bonjour, j’aurai aimé avoir la carte bathimetrique de l’étang de torcy neuf svp si possible merci
Bonjour Flavien.
La carte du Torcy Neuf est déjà dans l’application.
Cdlt
PaVince
Super interessant, j’aimerai savoir comment recupérer la carte bary du lac de retenu d’Apremont en Vendée (85) ?
Bonjour Pascal
Liste des cartes ici :
https://www.fishteam69.fr/inav-cartes-des-fonds-disponibles-bathymetrie/
Bonjour !
Je suis intéressé par les cartes bathymétriques que vous proposez et je souhaiterais vous proposer un partenariat.
Aujourd’hui je réalise des cartes topographiques en bois et en relief avec BOILISÉ.
J’ai fait quelques tests de cartes de lac avec des contours bathymétriques et j’y vois un joli potentiel de développement : les pêcheurs pourraient retrouver la profondeur de leurs lacs préférés dans des tableaux déco artisanaux.
N’hésitez pas à me contacter directement à mon adresse email pour en discuter.
Félicitations pour tout le travail accompli autour de la pêche et surtout de la bathymétrie des points d’eau français.